 RF
RFUnderstanding Underwater Sensor Network (UWSN) Dimensions: 1D, 2D, 3D, and 4D
Advertisement
Underwater Sensor Networks (UWSNs) are designed to operate beneath the water’s surface, using water as the communication channel. These networks typically consist of transmitters and receivers. Due to the limitations of electromagnetic and optical waves in water, acoustic waves are primarily used for communication in underwater sensor-based networks. This technology, which emits sound pulses and detects or measures reflected pulses, is known as SONAR.
SONAR locates objects by estimating the acoustic travel time and direction of arrival between a sonar sensor and the object. It’s similar to radar, ultrasound, and seismic technologies. There are two main types of SONAR: active and passive.
UWSN architectures can be broadly classified into two types: centralized and decentralized.
- Centralized Architecture: Sensor nodes are deployed at the bottom of the ocean and communicate with one or more underwater installed sinks (uw-sinks). These uw-sinks act as relays between the underwater nodes and a surface station.
- Decentralized Architecture: Nodes communicate with a sea surface station through their neighboring nodes. No uw-sinks or relays are needed. Nodes are installed at different depths, with nodes at the bottom communicating with nodes above them, gradually relaying information to the surface station.
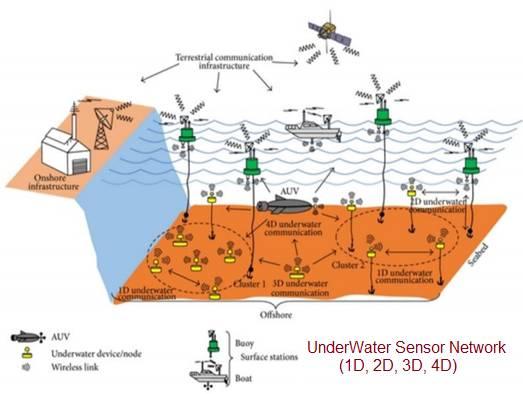
Let’s delve into the different dimensional UWSN architectures: 1D, 2D, 3D, and 4D.
1D (One-Dimensional) UWSN
In a 1D UWSN, sensor nodes are deployed autonomously and operate as a standalone network. Each sensor node directly transmits information to a remote sea surface station. As depicted in the image, underwater nodes, Autonomous Underwater Vehicles (AUVs), boats, and buoys communicate using RF signals (i.e., wireless links).
2D-UWSN
In a 2D-UWSN, communication occurs in two stages:
- Each sensor within a cluster communicates with its anchor node using a horizontal communication link.
- The anchor node then communicates with a surface buoyant node using a vertical communication link.
3D-UWSN
In a 3D UWSN architecture, sensors are deployed in clusters anchored at varying depths and heights. These networks come in two flavors:
- Static 3D UWSN: The sensor nodes remain in fixed positions.
- 3D UWSN using AUVs: Autonomous Underwater Vehicles (AUVs) are used to collect and relay data from the static sensor nodes.
4D-UWSN
The 4D UWSN architecture combines the features of fixed 3D UWSNs and mobile UWSNs. This configuration, utilizing acoustic sensor networks and underwater mobile units (Remotely Operated Vehicles (ROVs) and AUVs), is suitable for large-scale exploration in the deep sea.
- ROVs (Remotely Operated Vehicles) are controlled remotely by human operators.
- AUVs (Autonomous Underwater Vehicles) operate independently without direct human control.
Mobile underwater ROVs collect data from anchor nodes and relay it to a remote station.




