 RF
RFthe LIN Bus: A Cost-Effective Alternative to CAN
Advertisement
The LIN (Local Interconnect Network) bus serves as a complement to the more robust CAN (Controller Area Network) bus. While offering lower performance and reliability compared to CAN, LIN provides a significantly more cost-effective solution.
LIN vs. CAN: Key Differences
Unlike CAN, which relies on twisted, shielded dual wires for communication, LIN utilizes a single wire. This simplifies the wiring harness and reduces costs.
Network Architecture: Master-Slave Setup
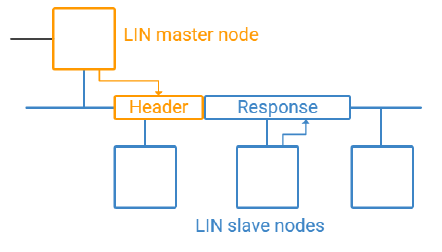
A LIN network operates with a single master node and multiple slave nodes. The master initiates communication, and the slaves respond accordingly.
Data Rate and Standards
LIN employs 6-bit identifiers and supports a maximum data rate of 20 kbps. The initial LIN 1.0 standard was introduced by the LIN consortium in 1999, with subsequent versions adding more features. LIN has become a standard in modern vehicles.
Applications of LIN
LIN is commonly found in applications such as:
- Steering control
- Comfort systems
- Powertrain components
- Cooling fan motors
- Side mirrors
- Windows
- Air conditioning
- Window wipers
In essence, LIN is well-suited for low-speed, short-distance communication between various electronic control units (ECUs) within vehicles or industrial equipment.
How LIN Communication Works
As illustrated below, a LIN network consists of a single master and several slaves. The master initiates communication by sending a “request frame,” prompting the appropriate slave to respond with a “response frame.”
LIN Frame Format
The LIN bus message frame comprises a “header” (the request) and a “response.” Understanding the frame format is crucial for understanding how master and slave devices communicate.
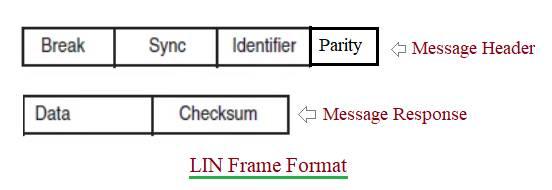
The LIN frame consists of the following fields in both request and response messages:
- Break: Signals the start of a frame to all nodes on the LIN bus. It is typically a minimum of 13+1 bits long, or more commonly 18+2 bits.
- Sync: Contains the value 0x55 (01010101 in binary), an 8-bit sequence that allows LIN nodes to maintain synchronization.
- Identifier: A 6-bit field that serves as an identifier for each message sent and the corresponding response. Out of the 64 possible IDs, 60/61 are reserved for diagnostics, and 62/63 are further reserved.
- Parity: A 2-bit field used for error detection.
- Data: Slave nodes respond to the master’s request by transmitting data bytes. These can be 2, 4, or 8 bytes in size, containing the actual information in the form of LIN signals.
- Checksum: An 8-bit field that ensures the validity of the LIN frame. The calculation method varies depending on the LIN version (e.g., LIN 1.3 or LIN 2.0).
LIN Frame Types
There are six distinct LIN frame types, each designed to handle specific communication needs:
- Unconditional Frames: These frames are transmitted periodically at fixed intervals, typically in a cyclical manner. They are used for sending essential and time-critical information, such as status updates or sensor readings. ID range: 0-59.
- Event Triggered Frames: These frames are sent in response to specific events or triggers within the system. They are used when immediate data transmission is required following an event, such as user input or a sensor detecting a critical condition. ID range: 0-59.
- Sporadic Frames: These frames are sent at irregular intervals, not following a strict periodic pattern. They are typically used for non-time-critical data that doesn’t fit the regular timing of unconditional frames. ID range: 0-59.
- Diagnostic Frames: These frames are used for onboard diagnostics and fault detection in the vehicle’s electronic systems. They contain information related to the health and status of various components and ECUs. Since LIN 2.0, IDs 60-61 are used for reading diagnostic information from the master or slaves. Frames always contain 8 data bytes. ID 60 is used for the master request, and 61 for the slave response.
- User Defined Frames: These frames allow for customization of LIN communication to meet specific application requirements. These frames are not predefined in the LIN standard and can be tailored to transmit user-specific data and information. These frames provide flexibility for manufacturers to adapt the LIN network to their particular needs. ID 62 is a user-defined frame that may contain any type of information.
- Reserved Frames: These frames are not currently assigned to any specific function or purpose in the LIN network. They are typically left unused or unallocated for potential future enhancements or industry-specific applications. Reserved frames have ID 63 and must not be used in LIN 2.0 specifications.
LIN Bus Errors
LIN bus errors can disrupt communication and affect the overall performance of the network.
Identifying and addressing these errors is essential for the efficient operation of the electronic systems within modern automobiles. LIN bus errors are valuable tools for automotive mechanics and engineers as they assist in diagnosing problems, troubleshooting issues, maintaining systems, optimizing performance and ensuring the safety and reliability of vehicles.
Similar to CAN bus errors, common LIN bus error types include:
- LIN Checksum Error: Occurs when the checksum calculated by the receiving node doesn’t match the checksum included in the received data, indicating potential data corruption.
- LIN Receive Error: Occurs when a specific part of a LIN message does not match the expected value. In other words, it occurs when there is a mismatch between transmitted data and that’s read by LIN bus.
- LIN Synchronization Error: Indicates an invalid sync field at the start of the LIN frame. It can also indicate a bit rate deviation between the one configured by the LIN node and detected from SYNC field.
- LIN Transmission Error: Can occur when LIN identifiers are registered as SUBSCRIBER messages and there are no nodes available to respond to the SUBSCRIBER message.
- Bit Errors: Occur when transmitted data does not match the data received by the receiver node, potentially due to electrical noise, signal distortion, or other parameters.
- Timeout Errors: Occur when a LIN node does not receive expected data within a specified timeframe.
- Bus Off Errors: A LIN node can enter this state if it detects a severe fault or excessive errors on the bus. In this state, the LIN node does not participate in communication until the issue is resolved.
Conclusion
Diagnosing and addressing LIN bus errors promptly is crucial, as they can impact the reliability and safety of automotive systems and industrial applications. Diagnostic tools and techniques are employed to identify and resolve LIN bus errors, ensuring proper communication among connected ECUs.
Advertisement





