 RF
RFStereo Vision vs. Structured Light vs. Time of Flight (ToF)
Advertisement
This article compares three 3D imaging technologies: Stereo Vision, Structured Light, and Time of Flight (ToF). It highlights the differences between them, including their advantages and disadvantages as depth-sensing technologies.
Stereo Vision
This method utilizes two cameras separated by a specific distance, mimicking human eyes. As illustrated in the figure below, each camera captures the object’s position, represented by angles “α” and “β”.
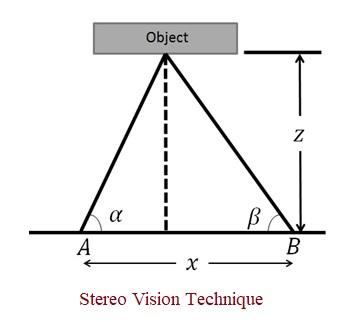
Using these angles, the depth “Z” can be calculated using the following equation:
Z = { x /( (1/tanα) + (1/tanβ) )}
Advantages:
- Lower implementation cost due to the use of cheaper, off-the-shelf cameras.
- Its human-like configuration makes it suitable for capturing images for intuitive presentation to human beings.
Disadvantages:
- Depth resolution error increases quadratically with distance in stereo vision.
- The major challenge is solving the correspondence problem. Without accurate correspondence, determining disparity and depth becomes difficult. Solving this problem often requires computationally intensive and complex algorithms.
- Stereo vision is less effective at measuring distance from uniformly colored surfaces.
Structured Light
This method works by projecting known patterns onto an object and analyzing the distortion of the reflected signal.
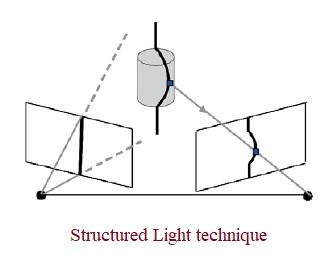
The figure above depicts the concept of structured light.
Advantages:
- Offers relatively higher spatial resolution with the use of off-the-shelf HD Color cameras and DLP projectors.
Disadvantages:
- The reflected pattern is sensitive to optical interference from the surrounding environment. Therefore, this technique is best suited for indoor applications.
Time of Flight (ToF)
This technique uses a camera that illuminates the scene with a modulated light source and observes the reflected light signal. The source can be either continuous wave (CW) or pulsed, typically sinusoidal or square wave in shape.
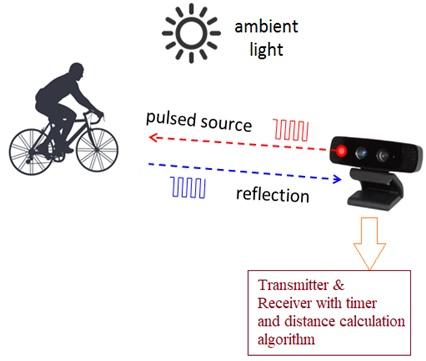
There are two main types of ToF techniques: Direct ToF (DToF) and Indirect ToF (IToF).
Depth can be measured using the following equation:
Depth, d = c*ΔT/2
Where:
- c = Speed of light (3 x 108 m/s)
- ΔT = Time interval between light emission and received light by the camera sensor
In the automotive industry, ToF sensors are widely used for autonomous driving and surrounding awareness for safety. ToF technology has wide applications which include robotics, digital signage, virtual reality, home automation, sports & fitness, video games, 3D scanning, user interface control, augmented reality and so on.
Advantages:
- While depth resolution error is sensitive to distance in ToF, increasing the energy of the illuminated signal can overcome this. This maximizes measurement accuracy using techniques like the Kalman filter.
- ToF sensing does not have limitations when measuring distance from uniformly colored surfaces as it does not depend on color or texture.
- ToF is less sensitive to mechanical alignment and environmental lighting conditions.
- It is more compact mechanically.
- It is a very cost-effective technique.
Disadvantages:
- The current ToF technology offers lower resolution compared to structured light, but it is rapidly evolving.
Difference between Stereo Vision, Structured Light, and ToF
The following table outlines the differences between Stereo Vision, Structured Light, and ToF (Time of Flight) techniques:
| Comparison Parameters | Stereo Vision | Structured Light | ToF (Time of Flight) |
|---|---|---|---|
| Software Implementation Complexity | High | Medium | Low |
| Cost of Material | Low | High | Medium |
| Compactness | Low | High | Low |
| Response Time | Medium | Slow | Fast |
| Accuracy of Depth Measurement | Low | High | Medium |
| Performance in Low Light Environment | Weak | Good | Good |
| Performance in Bright Light Environment | Good | Weak | Good |
| Power Consumption | Low | Medium | Medium |
| Scalable Range | Limited | Scalable | Scalable |
Advertisement






