 RF
RFDifferential Encoder and Decoder Explained
Advertisement
As we know, synchronization is very essential in digital communication systems. This is needed at the receiver to detect the transmitted data from the received, potentially corrupted, input signal waveform. Three types of synchronization need to be performed at the receiver: bit synchronization, frame synchronization, and carrier synchronization.
Bit synchronization helps distinguish bit intervals.
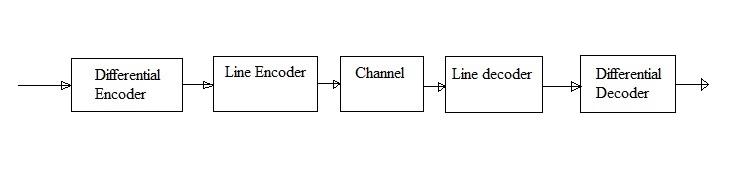
Fig.1 System block diagram
A differential encoder is often used for bit synchronization. It helps remove unintentional inversions of the binary input waveform. The polarity of the differentially encoded signal can be inverted without having any effect on the decoded signal waveform.
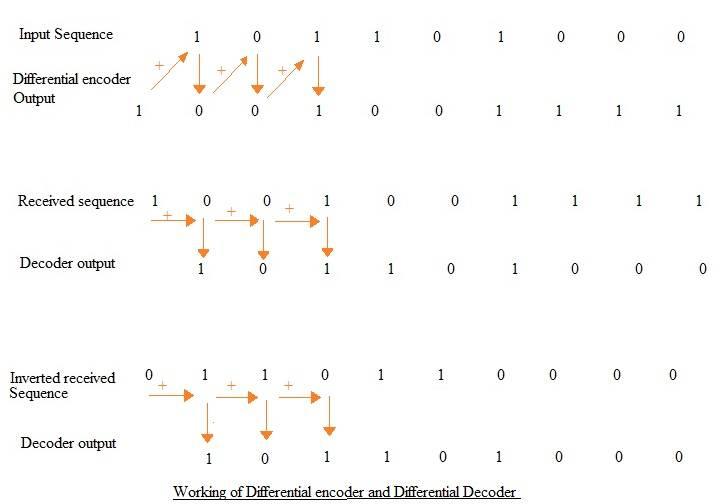
Fig.2 Example showing decoding is the same even if polarity has been inverted.
Differential Encoder
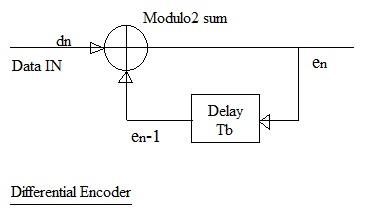
Fig.3 Differential encoder
In the differential encoder, input data bits are combined using modulo-2 SUM (which is the same as EX-OR) with the previous output bits. The differential encoder equation is:
en = dn ⊕ en-1
Differential Decoder
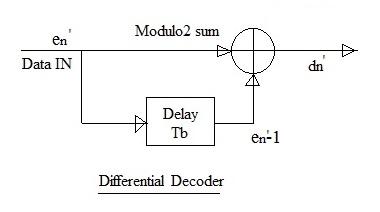
Fig.4 Differential decoder
In the differential decoder, the current input and a delayed version of the same input are fed to a modulo-2 summer. This produces the output bits. The differential decoder equation is:
d’n = e’n ⊕ e’n-1
This combination of encoder and decoder helps in clock recovery, and hence data bit streams can be easily derived even after corruption and phase inversion.
Advertisement



