 RF
RFDifference between Z-Transform and Inverse Z-Transform
Advertisement
This article explains the fundamental differences between the Z-Transform and its inverse.
Z-Transform
The Z-Transform is essentially the discrete-time equivalent of the Laplace Transform. Think of it as a way to analyze discrete signals in a different domain, making certain operations and analyses simpler.
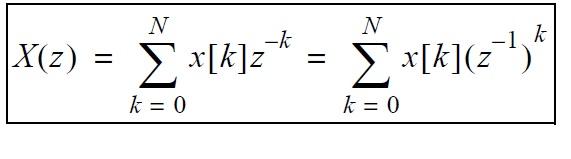
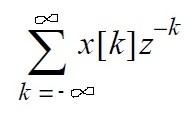
Mathematically, the Z-transform of a discrete-time signal is defined as:
A crucial concept associated with the Z-Transform is the Region of Convergence (ROC). The ROC defines the range of ‘Z’ values for which the summation above converges to a finite value.
Properties of the ROC:
- The ROC of X(z) forms a ring in the Z-plane, centered around the origin.
- The ROC cannot contain any poles.
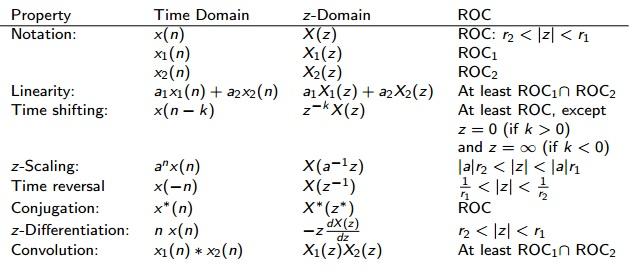
Properties of the Z-Transform:
The Z-Transform has several useful properties that simplify signal processing tasks.
Inverse Z-Transform
The Inverse Z-Transform, as the name suggests, is the process of converting a signal from the Z-domain back to the time domain. It essentially reverses the Z-Transform operation.
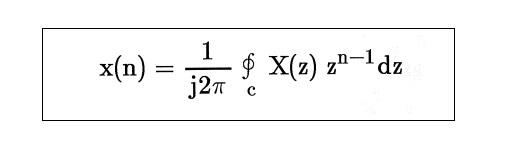
The equation for the Inverse Z-Transform is:
Where the integral represents a counter-clockwise contour integration around a circular path centered at the origin with radius ‘a’.
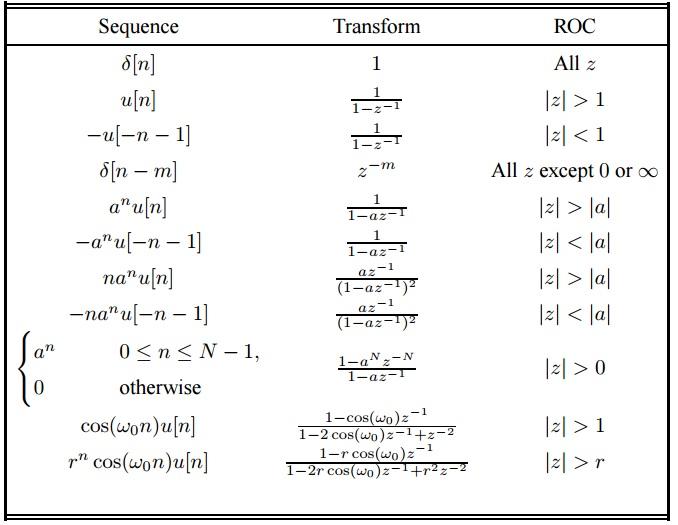
Here’s a table of common Z-Transform pairs for some frequently used functions:
Advertisement

